Abstract
Recent advances in deep monocular visual SLAM have achieved impressive accuracy and dense reconstruction capabilities, yet their robustness to scale inconsistency in large-
scale indoor environments remains largely unexplored. Existing benchmarks are limited to room-scale or structurally simple settings, leaving critical issues of intra-session scale drift and inter-session scale ambiguity insufficiently addressed.
To fill this gap, we introduce the ScaleMaster Dataset, the first benchmark explicitly designed to evaluate scale consistency under challenging scenarios such as multi-floor structures, long trajectories,
repetitive views, and low-texture regions. We systematically analyze the vulnerability of state-of-the-art deep monocular visual SLAM systems to scale inconsistency, providing both
qualitative and quantitative evaluations. Crucially, our analysis extends beyond traditional trajectory metrics to include a direct map-to-map quality assessment using metrics like Chamfer distance against high-fidelity 3D ground truth.
Our results reveal that while these traditional methods demonstrate strong performance on existing benchmarks, they suffer from severe
scale-related failures in realistic, large-scale indoor environments. By releasing the ScaleMaster dataset and baseline results, we aim to establish a foundation for future research toward developing scale-consistent and reliable visual SLAM systems.
Dataset Statistics
25
Sequences
3.8 km+
Total Length
10+
Environments
RGB+D+IMU
Data Type
Baseline SE(3) Pose Refinement
Raw ARKit VIO poses accumulate drift over long trajectories. We correct this by manually identifying loop closures and optimizing the pose graph to produce drift-corrected ground-truth poses.
Pipeline Overview
- ARKit VIO odometry — Raw 6-DoF poses captured from Apple ARKit; drift accumulates over large-scale trajectories.
- HLoc retrieval — NetVLAD selects loop closure candidates; SuperPoint + LightGlue verifies geometric consistency via Essential-matrix.
- Manual verification — Each candidate is accepted or rejected interactively, ensuring only reliable loop pairs are used.
- SE(3) relative pose estimation — Depth Anything V3 provides metric depth to compute the 6-DoF transform between accepted loop pairs.
- GTSAM PGO — Pose graph optimization jointly minimizes odometry and loop closure residuals, yielding drift-corrected trajectories.
Before / After Pose Graph Optimization
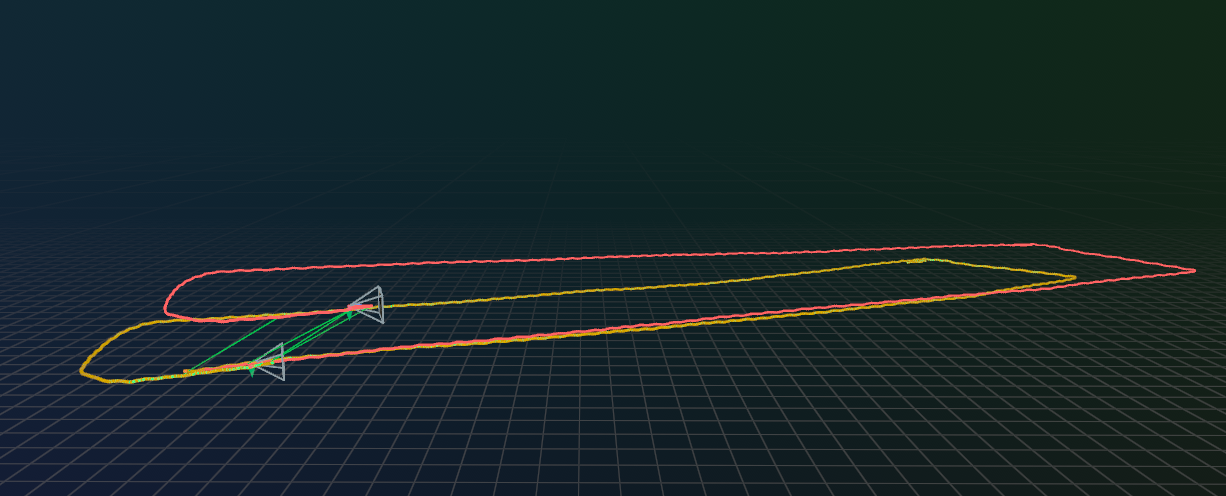
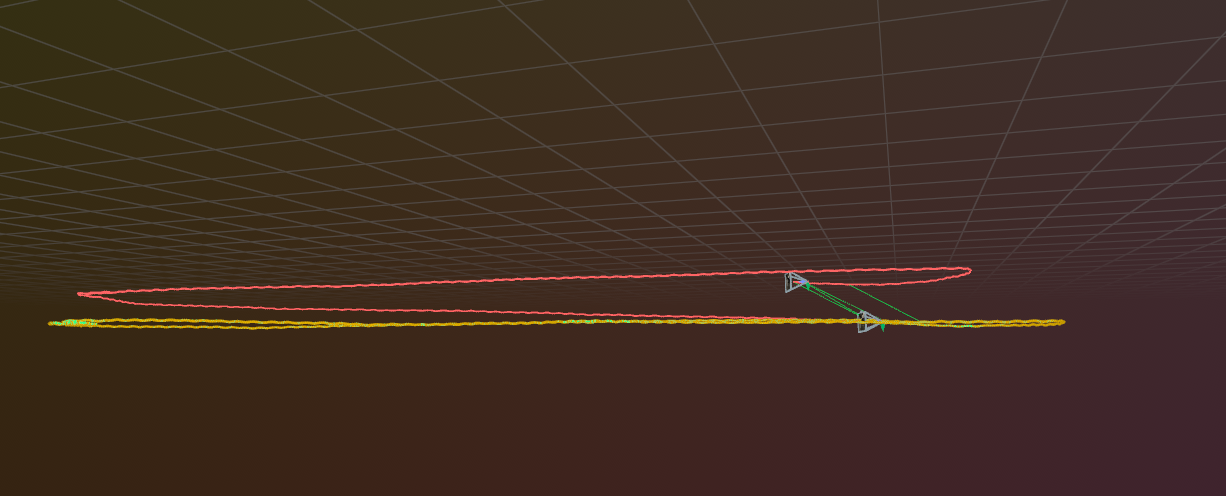
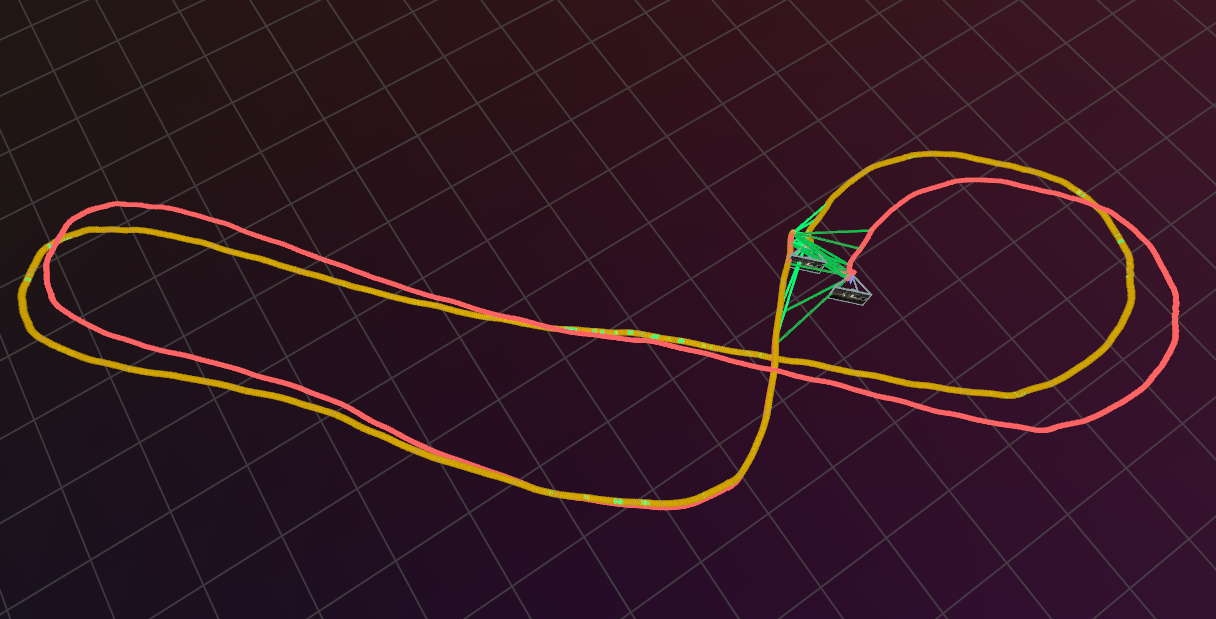
Red = trajectory before PGO | Yellow = trajectory after PGO | Green = verified loop closures
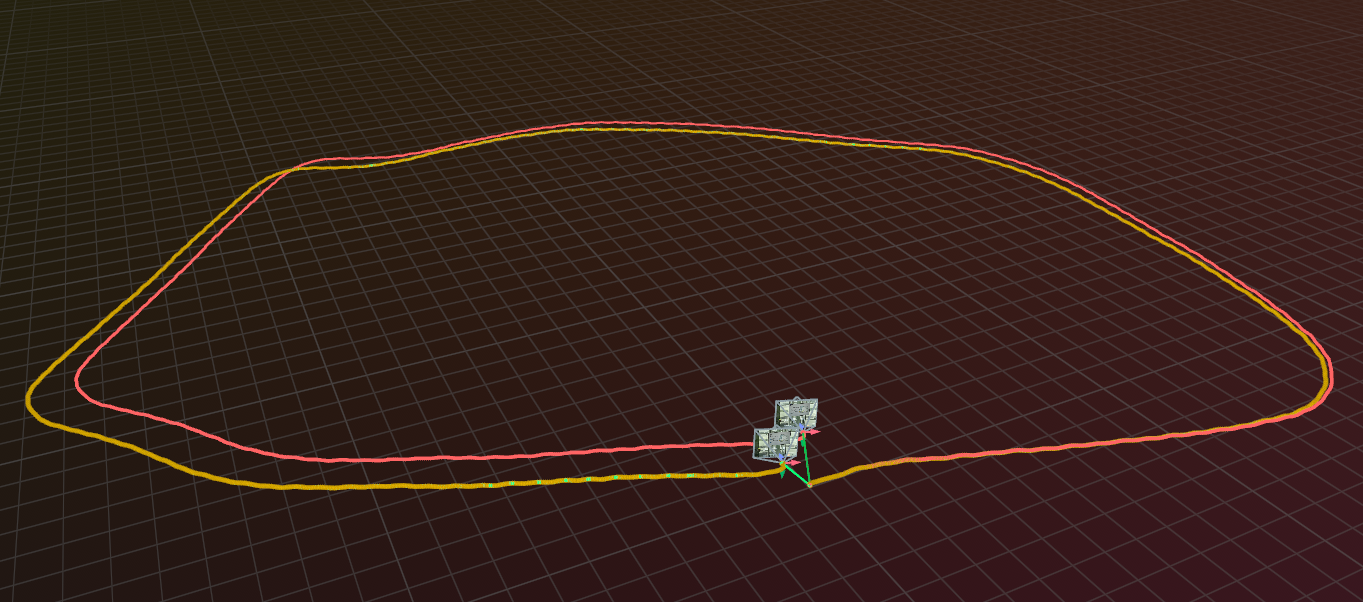
Rerun Visualization
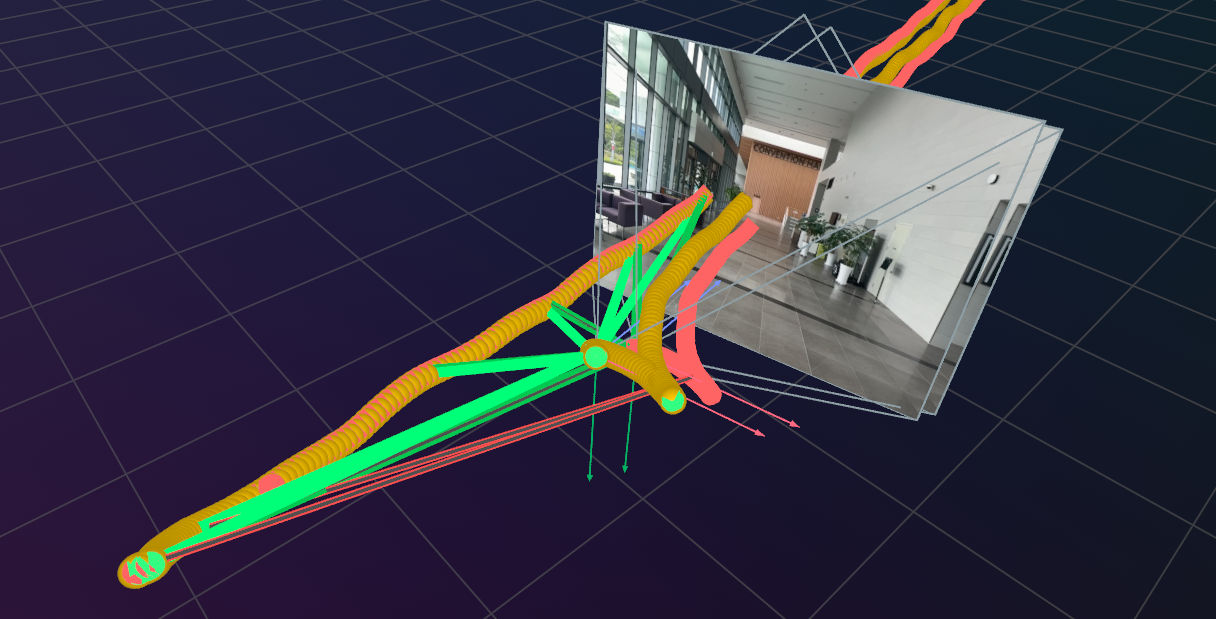
3D trajectory with camera frustums, loop closure edges, and RGB images in Rerun.
Demo
Dataset Sequences
Click on any sequence to explore in 3D
📚 Library Environments (9 sequences)
Library 01
Library 02
Library 03
Library 04
Library 05
Library 06
Library 07
Library 08
Library 09
🏢 Large Hall Environments (5 sequences)
LargeHall 01
LargeHall 02
LargeHall 03
LargeHall 04
LargeHall 05
🚗 Parking & Basement (3 sequences)
Parking 01
Parking 02
Basement 01
🪜 Stairs & Station (3 sequences)
Stairs 01
Stairs 02
Station 01
🏠 Indoor Rooms (5 sequences)
HotelRoom 01
Lab 01
Office 01
Lobby 01
Lounge 01
Download Dataset
Citation
@inproceedings{ju2026scalemaster,
title={Have We Mastered Scale in Deep Monocular Visual SLAM? The ScaleMaster Dataset and Benchmark},
author={Ju, Hyoseok and Suh, Bokeon and Kim, Giseop},
booktitle={Proceedings of the IEEE International Conference on Robotics and Automation (ICRA)},
year={2026},
note={To appear}
}